Résumé
L’objectif du projet de recherche, qui est mené à la FHNW en collaboration avec SNCF Réseau, est d’utiliser l’intelligence artificielle (IA) et une intégration de données multimodales (séries temporelles multispectrales par satellite, images aériennes, informations agricoles et climatologiques, ainsi que des données provenantes de capteurs terrestres) pour modéliser les probabilités de résidence de la faune à proximité de l’infrastructure des voies du réseau de la SNCF.
Les modèles d’habitat prédictif qui en résultent aideront à mieux prévenir les incidents, par exemple par des mesures de construction appropriées dans des zones à risque spécifiques.
Dans ce projet Big Data, les dernières technologies de Machine Learning doivent être appliquées afin de pouvoir traiter les sources de données extrêmement exhaustives et exigeantes et d’établir des corrélations profitables à partir du traitement.
Le projet est basé sur une expérience reconnue de plusieurs années de l’Institut de géomatique de la FHNW dans le domaine des approches basées sur l’IA pour la détection, les tâches de classification et la modélisation dans le domaine des géodonnées complètes avec référence spatiale et temporelle.
Introduction
Dans le cadre d’une collaboration, les chercheurs Adrian Meyer (spécialiste des géodonnées et biologiste animalier) et Denis Jordan (professeur de mathématiques appliquées) ont lancé un projet en 2023 avec Pascal Baran, SNCF Réseau, la branche infrastructure de la société nationale des chemins de fer français. L’équipe exploite la puissance de l’apprentissage automatique pour s’attaquer à un problème croissant sur les voies ferrées : Les accidents liés à la faune et à la flore.
Les accidents impliquant des animaux sauvages, en particulier des sangliers et des cerfs, représentent un risque important pour le vaste réseau ferroviaire français. Ils posent non seulement des problèmes écologiques, de sécurité et de propriété, mais entraînent également des coûts financiers importants, estimés jusqu’à 100 000 euros par incident sur les lignes à grande vitesse, tout en totalisant plus de 200 000 minutes de retard chaque année. Les méthodes traditionnelles pour éviter ces accidents, telles que les clôtures, les passages pour animaux sauvages et les dispositifs d’effarouchement, demandent beaucoup de ressources et ne sont pas toujours efficaces, car il est difficile de prédire les points chauds de la faune.
Cependant, l’équipe vise à révolutionner ce processus en créant un système complet de prédiction des risques d’accidents impliquant des animaux sauvages. À l’aide d’une série de sources de données, ils développent un modèle prédictif dynamique qui utilise de nouveaux algorithmes d’apprentissage automatique pour évaluer le risque de présence d’animaux dans des zones spécifiques. Ces informations permettront des interventions plus précises et plus rentables, ce qui pourrait réduire le nombre d’accidents et renforcer la fiabilité et la sécurité du réseau.
Les modèles intégreront des images provenant d’ensembles de données de télédétection aérienne et satellitaire, des photographies de cartographie mobile basées sur des pistes et des images infrarouges provenant de drones et de pièges photographiques. Ces données seront utilisées pour former un modèle de fusion multimodale prédictif qui génère des scores de risque localisés, mettant en évidence les points chauds potentiels pour la faune et la flore. Une fois convertis en cartes, ces scores de risque constitueront un outil essentiel pour planifier des mesures d’atténuation.
Ce projet est une réponse à la forte augmentation récente des incidents liés à la faune sur les chemins de fer français, qui comprennent environ 30 000 km de lignes. L’échelle du pays nécessite des structures de bases de données géospatiales modernes utilisant des stratégies Big Data efficaces. Avec environ 1 500 incidents de régularité liés à des rencontres avec des animaux sauvages qui affecteront environ 8 000 trains d’ici 2020, la SNCF a reconnu la nécessité d’une solution innovante.
L’objectif final est un prototype de logiciel flexible capable de prédire la présence d’animaux sur de larges portions du réseau SNCF. Il calculera un facteur de risque de collision pour des sections à petite échelle sur chaque voie, fournissant une base d’information localisée multitemporelle pour des processus tels que la construction de barrières, la mise en œuvre de passages pour animaux, ou des interventions telles que des dispositifs d’effarouchement et la gestion de la population.
Les résultats générés par ce projet marqueront une avancée significative dans l’intersection de la technologie et de la gestion de la faune, tout en améliorant la sécurité et la fiabilité des opérations ferroviaires françaises.

Fig. 1: Les pièges photographiques sont un outil éprouvé pour suivre l’abondance de la faune.

Fig. 2: Les sédiments boueux comme indicateurs de passage à faune.
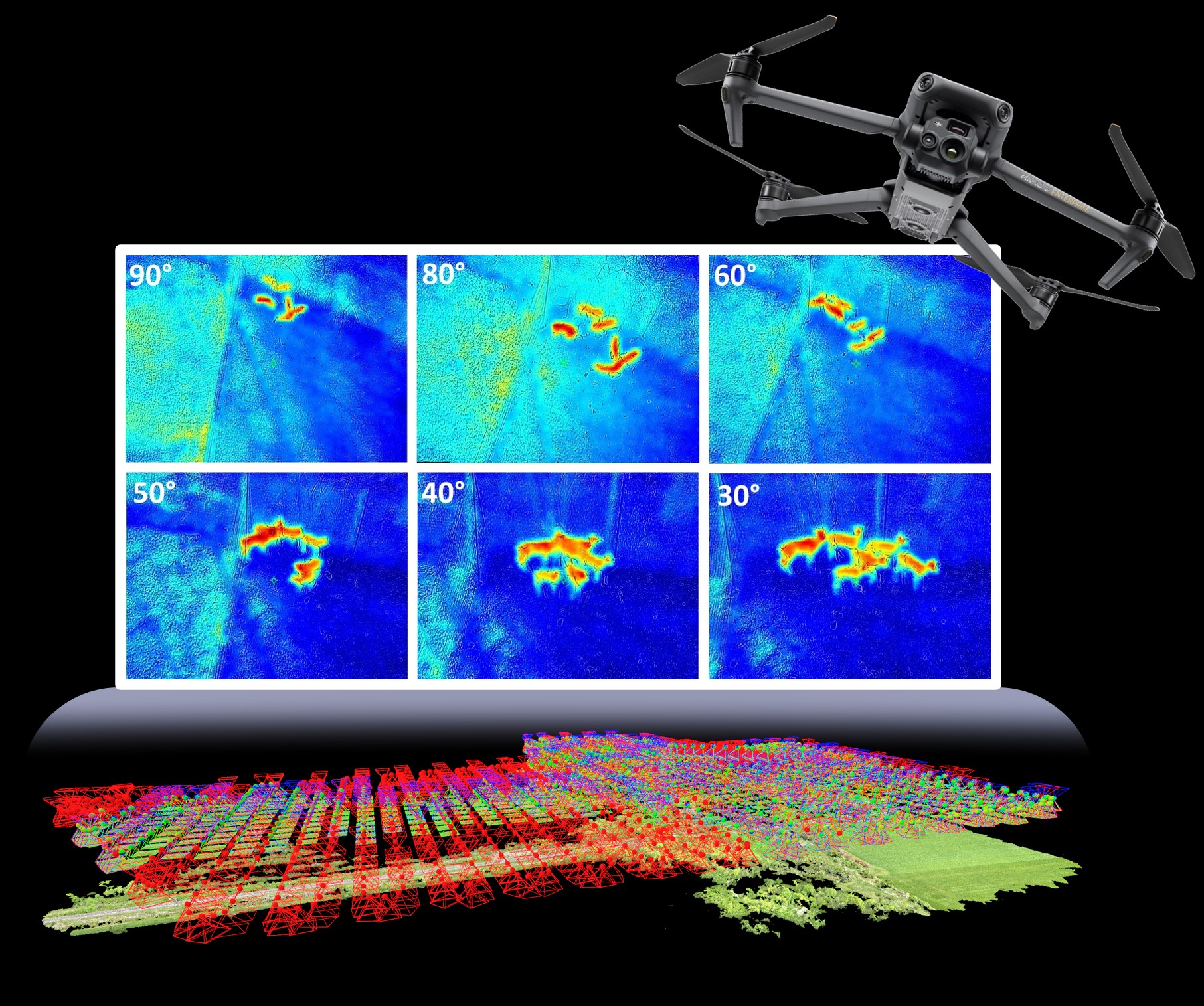
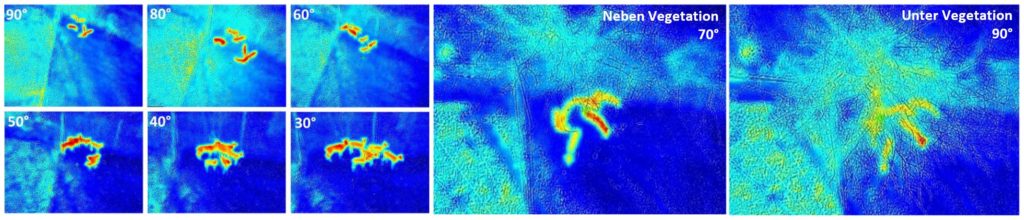
Fig. 3: Les enquêtes par drone permettent de collecter des modèles de terrain dans les zones sensibles et d’observer directement la faune à l’aide de caméras thermiques.
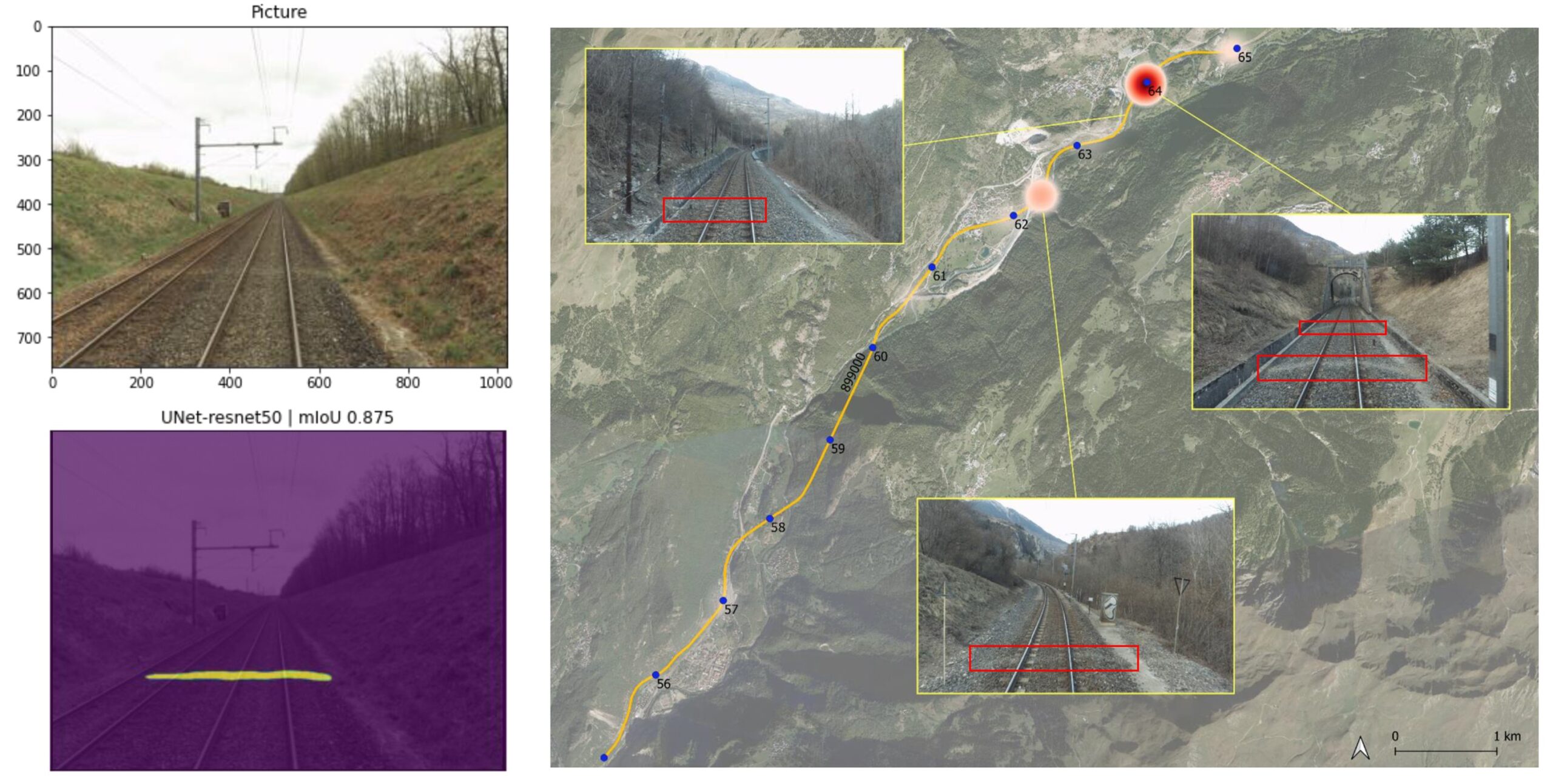
Fig. 4: Les images Mobile Mapping (Imajnet) peuvent être utilisées pour identifier les passages à faune particulièrement fréquentés par la coloration du gravier
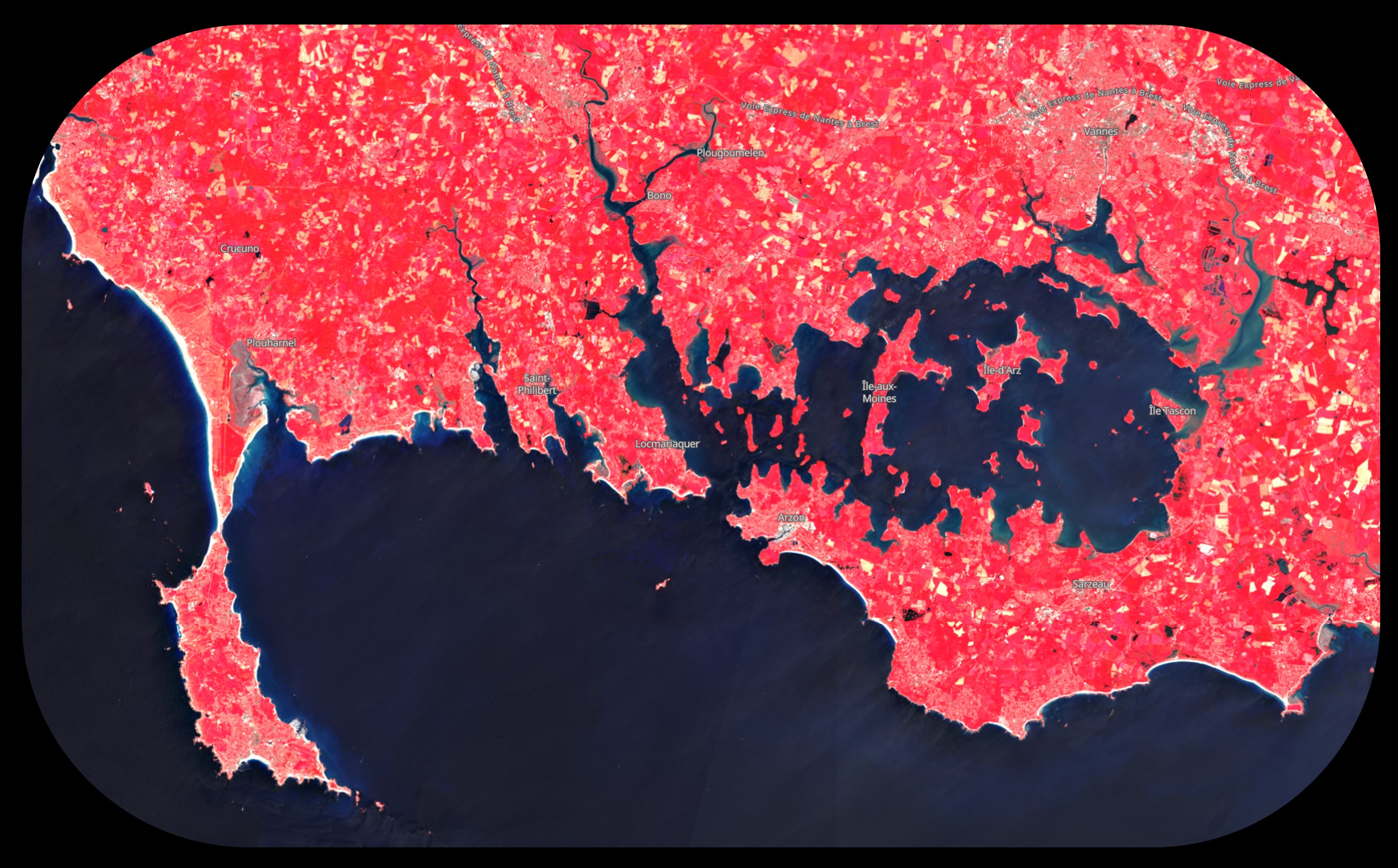
Fig. 5: Les données multispectrales haute résolution librement disponibles du programme de satellites Sentinel-2 de l’ESA fournissent tous les six jours l’occasion de calculer un modèle de paysage classifiable pour l’ensemble de la France.
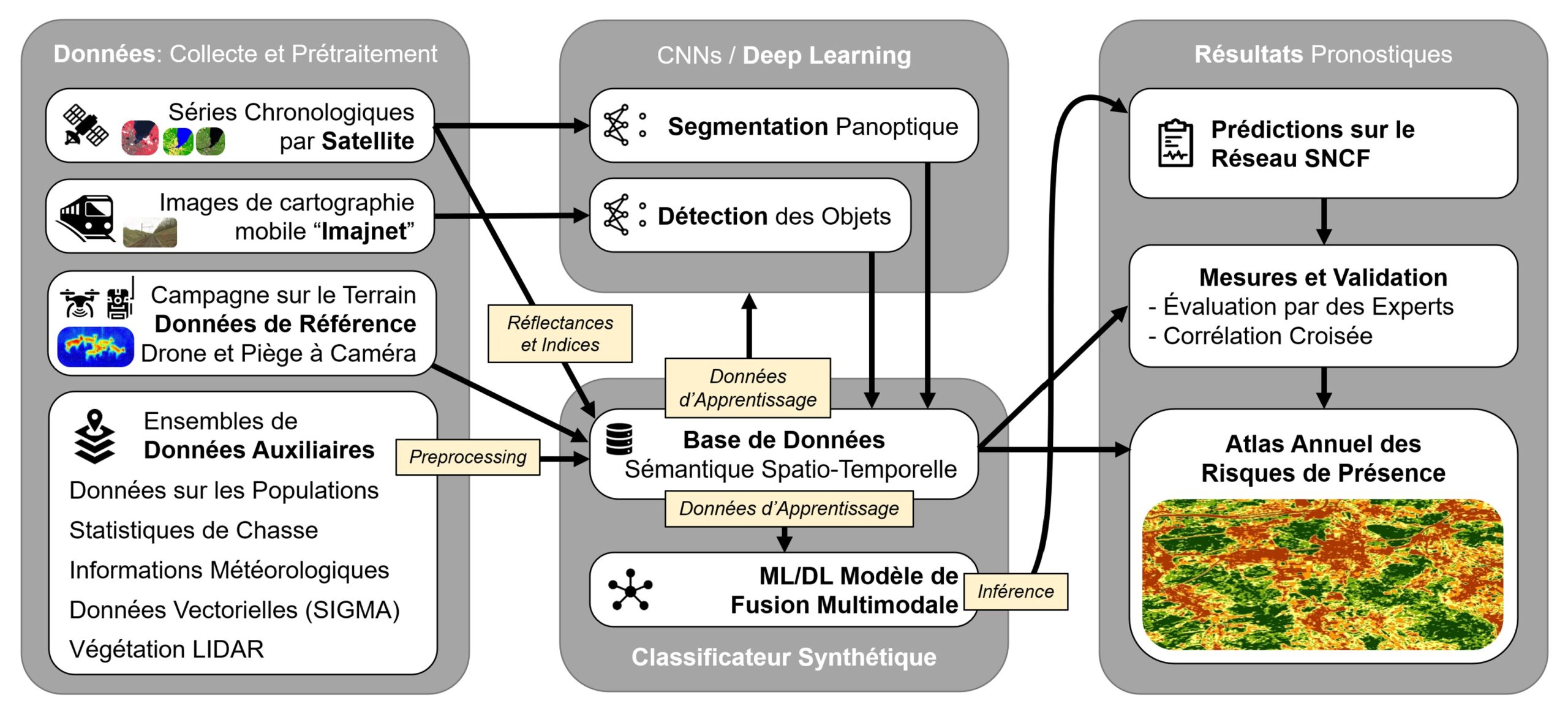
Fig. 6: Schéma du prototype d’IA multimodale (Statut de la version : Juin 2023)
Methode
Notre système accepte les données spatio-temporelles pour générer des prévisions de risques sur plusieurs horizons temporels (Fig. 6). Sa robustesse et son niveau d’automatisation élevé permettent la production d’un prototype pour identifier les points d’incidents critiques. Des étapes clés incluent la compilation de données, le prétraitement, la sélection de systèmes de classification et l’évaluation des approches algorithmiques, avec une attention particulière à la facilité d’utilisation et la scalabilité.
Pour prédire les niveaux de risque associés aux accidents de la faune sur le réseau ferroviaire, nous couplons les classifications automatisées de l’imagerie terrestre (Fig. 4) et de la télédétection
(Fig. 5) avec des modèles de Machine Learning. En présence d’une variance fluctuante, les modèles de réseaux neuronaux convolutionnels – par exemple les nouvelles architectures avec mémoire à court terme (CNN-LSTM) – sont plus performants que les modèles de régression traditionnels.
Nous étudierons les approches de fusion précoce, tardive et hybride pour identifier le modèle de prédiction des risques le plus efficace. La fusion précoce simplifie le processus de formation en utilisant un seul modèle, mais les résultats peuvent manquer d’interprétabilité. La fusion tardive fournit des décisions spécifiques à la modalité et gère bien les données manquantes, mais nécessite une ingénierie des caractéristiques étendue et des modèles multiples. La fusion hybride combine la fusion précoce et la fusion tardive, offrant des résultats complets au prix d’une complexité accrue.
Une expertise du réseau ferroviaire et des habitats animaux locaux (Fig. 7) est essentielle pour valider la précision des résultats prédictifs et la pertinence des données d’entrée de référence. Nous utilisons des marques de boue sur les voies ferrées (Fig. 2) comme indices indirects de la traversée par les sangliers, validées par des pièges photographiques (Fig. 1). Les drones équipés d’imagerie thermique infrarouge et de caméras zoom (Fig. 3) servent à surveiller le comportement et la population de la faune sauvage, soit en comptant les animaux en vol, soit en analysant les images avec des réseaux neuronaux de vision par ordinateur.
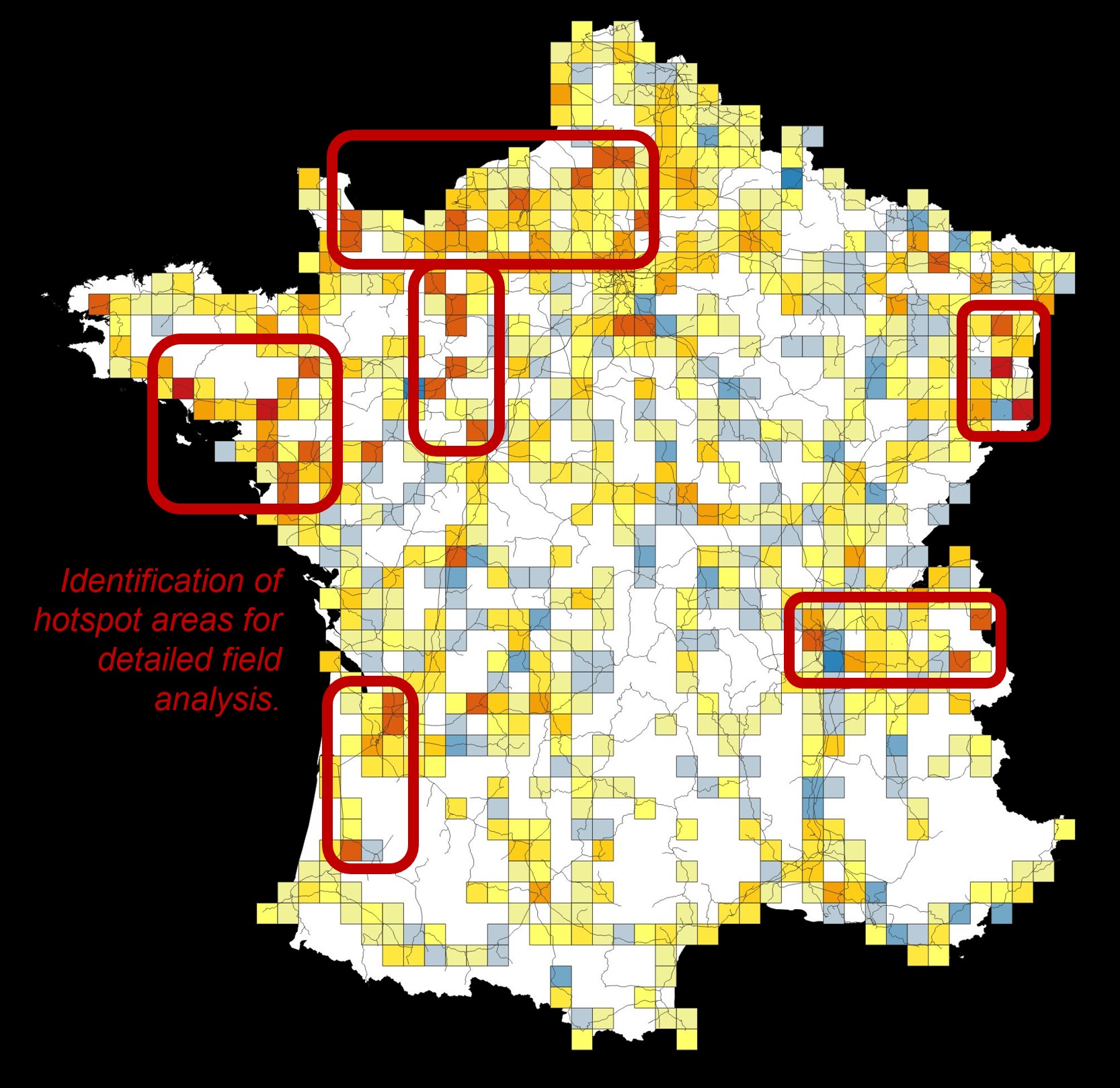
Fig. 7: Carte thermique de pronostic précoce pour l’évolution de l’intensité des incidents prévue pour 2024. Moyenne mobile intégrée autorégressive (ARIMA) basée sur les données d’incidents de 2015-2023 rééchantillonnées à une résolution de 20x20km.
Code couleur :
Bleu – Moins d’incidents prévus ; Blanc – Pas de changement / Pas de données ; Jaune – Plus d’incidents prévus ; Rouge – Forte intensification prévue.
Resultats
Le projet permettra d’établir des prévisions robustes, précises et opportunes des risques d’accidents impliquant des animaux sauvages (en particulier des sangliers) sur le réseau ferroviaire français. Ces informations, dérivées de modèles sophistiqués d’apprentissage automatique et de la fusion de données multimodales, permettront à la SNCF de mieux comprendre les points névralgiques des incidents. Cela pourrait permettre de réaliser d’importantes économies en réduisant le nombre et la gravité des incidents liés à la faune, ainsi que d’améliorer l’efficacité opérationnelle.
En facilitant une prise de décision plus éclairée, le système aidera la SNCF à mieux allouer les ressources pour les projets de construction d’infrastructures, tels que les clôtures et les passages pour animaux sauvages. En outre, l’atlas des prédictions du modèle peut servir d’intrant essentiel pour les stratégies de gestion de la faune, aidant ainsi la SNCF à maintenir une relation harmonieuse avec le milieu environnant.
À l’avenir, ce projet pourrait servir de modèle pour de nouvelles espèces cibles ou d’autres défis environnementaux fréquemment rencontrés. Au fur et à mesure que le système mûrit et que davantage de données sont collectées, il apprendra continuellement et affinera ses prédictions, ce qui augmentera encore sa valeur pour la SNCF.